Evolution
After the success of ArmStrong, I wanted to tackle a more complex challenge: bipedal locomotion. LegStrong applies the same teleoperation concept to walking.
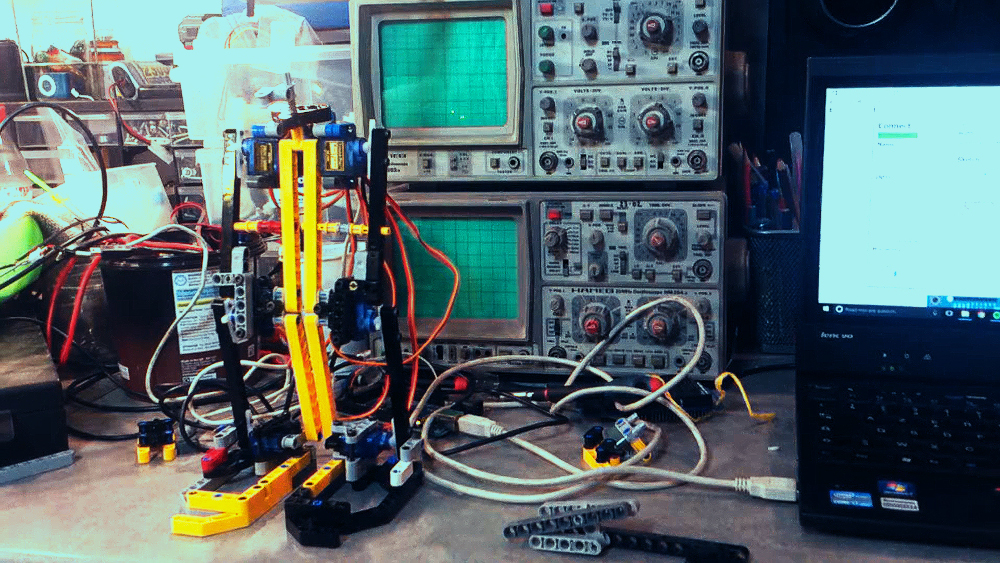
The System
The Exoskeleton (Input)
The passive exoskeleton captures leg motion using:
-
Potentiometers - measuring joint angles at hip, knee, and ankle
-
Accelerometers - capturing the dynamics of movement
-
Signal processing - computing angles, positions, and velocities in real-time
The Robot (Output)
A simple bipedal robot with:
-
3 servo-motors per leg (6 total)
-
Real-time mirroring of the exoskeleton movements
The Challenge of Walking
Walking seems simple, but it's incredibly complex:
-
Balance - constantly shifting center of mass
-
Coordination - precise timing between joints
-
Adaptation - responding to terrain and unexpected forces
Controlling a bipedal robot through teleoperation taught me to appreciate the sophistication of human locomotion that we take for granted.
Bridging Two Eras
LegStrong marks the end of my "Origins" era and the beginning of my formal engineering education. At 19, I was about to enter university, where these self-taught skills would be formalized and expanded.
The projects from 2004 to 2015 gave me an intuitive understanding of mechanics, electronics, and robotics. The next phase would add theoretical depth and professional rigor to this foundation.