The Turning Point
This was my first teleoperated arm robot, built at 17 as part of a school project. It represents a major evolution from my earlier work - moving from simple mechanisms to complex human-machine interfaces.
The Concept
The idea was simple but ambitious: create an exoskeleton for my arm that would control a robot arm in real-time. Whatever motion I made, the robot would replicate.
The Build
The Exoskeleton (Input)
-
3 potentiometers - one for each axis of rotation (shoulder, elbow, wrist)
-
1 push-button - for controlling the gripper
-
Scrap materials - most parts came from old devices
The Challenge
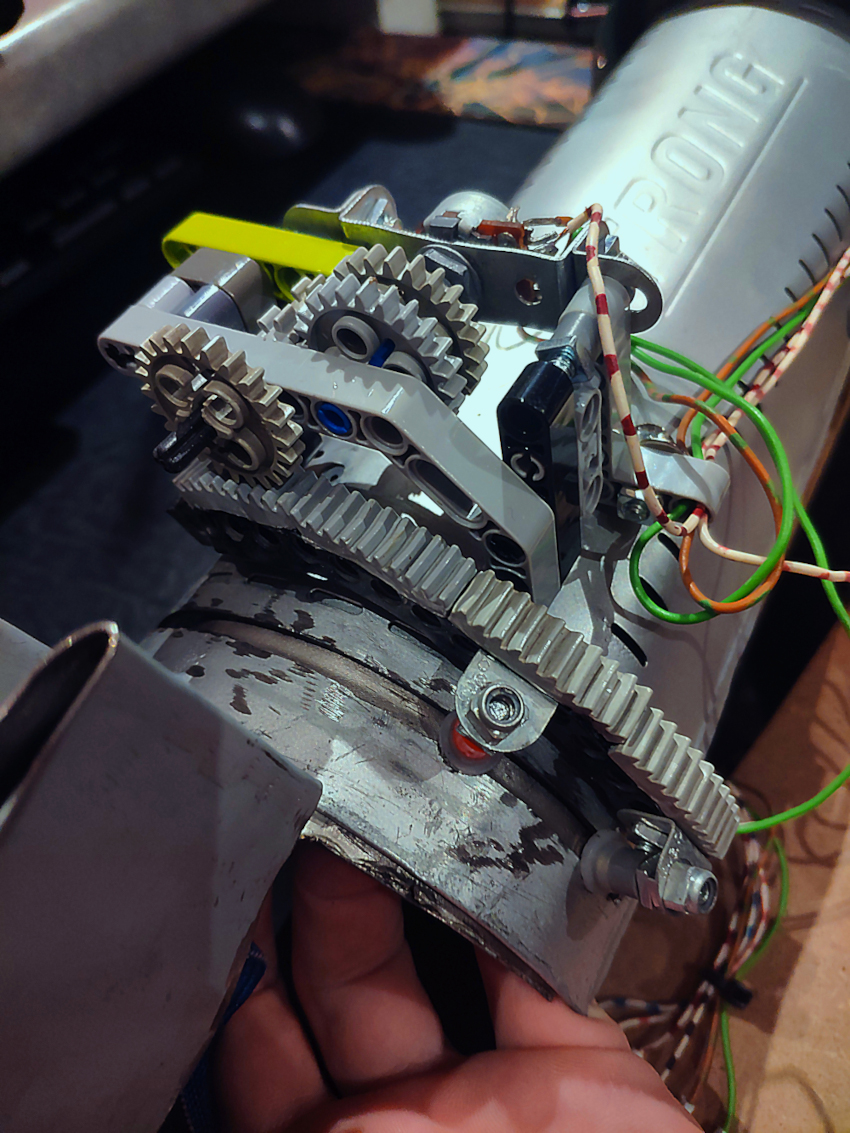
To activate the wrist potentiometer, I needed to create a mechanism that could translate wrist rotation into potentiometer rotation. I built this using a Lego rack bent in hot water.
Yes, I burned my fingers doing it. Learning often hurts.
The Robot Arm (Output)
A servo-driven arm that mirrored the exoskeleton's movements in real-time.
The Significance
ArmStrong was pivotal because it introduced me to:
-
Human-machine interfaces - translating human motion into machine action
-
Real-time control systems - immediate response to input
-
Teleoperation - remote control through body movement
These concepts would become central to my later work in prosthetics, where the challenge is reversed: translating intention into limb movement for people who have lost that ability.