Inspiration from Nature
Human skin is a remarkable sensing organ - multiple layers with specialized receptors for pressure, vibration, temperature, and more. The Modular e-Skin project recreates this architecture electronically.
System Design
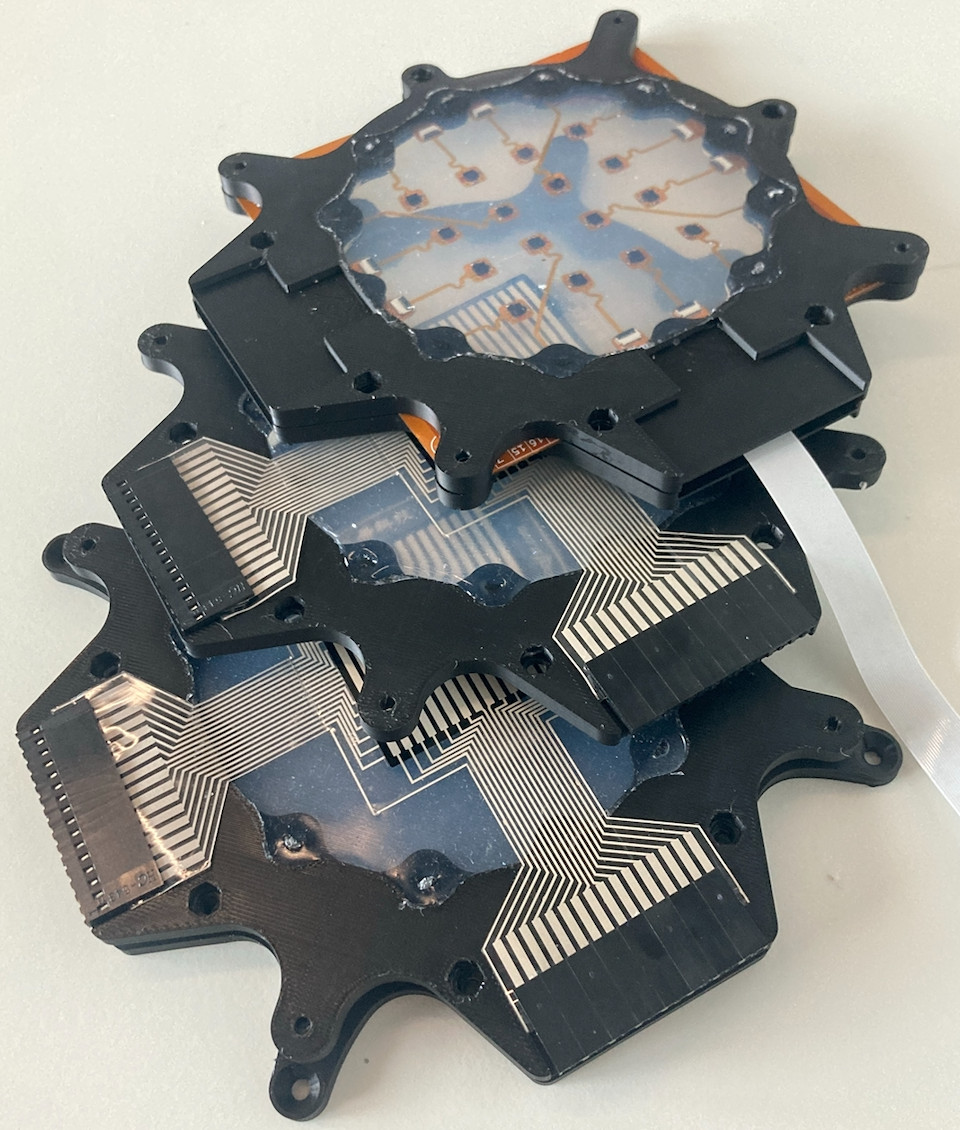
Layered Architecture
Inspired by human skin's structure:
-
Multiple silicone layers providing mechanical isolation
-
Each layer optimized for specific sensing tasks
-
Flexible and durable construction
Force Sensing
-
Two 16×16 FSR arrays (256 sensors each)
-
Normal force detection - how hard something is pressing
-
Shear force detection - sliding and friction sensing
Vibration Sensing
-
4×4 accelerometer array - 16 high-frequency sensors
-
Fine texture detection - sensing surface properties
-
Dynamic interaction capture - impact and slip events
Technical Innovation
Scalable Electronics
-
Modular design - add more sensors as needed
-
Efficient data acquisition - handling hundreds of channels
-
Flexibility maintained - sensors conform to surfaces
Signal Processing
-
Real-time processing of multi-channel data
-
Feature extraction for material identification
-
Integration with robotic control systems
Validation
Using a robotic arm interacting with controlled objects, the e-skin demonstrated:
-
Texture differentiation - distinguishing surface roughness
-
Shape recognition - identifying object geometry
-
Stiffness estimation - sensing material compliance
Applications
Robotics
Giving robots the ability to feel what they're grasping - essential for manipulation tasks.
Prosthetics
Providing sensory feedback to prosthetic users - enabling them to feel through their artificial limbs.
Human-Machine Interaction
Enabling more natural interfaces where touch matters.
Open Source
This system is designed as an open platform, allowing researchers worldwide to build upon this work and advance the field of artificial touch sensing.