The Dataset
This multi-sensory tactile dataset captures the full richness of human touch - not just pressure, but the complete sensory experience of exploring textured surfaces.
What We Capture
Haptic Signals
-
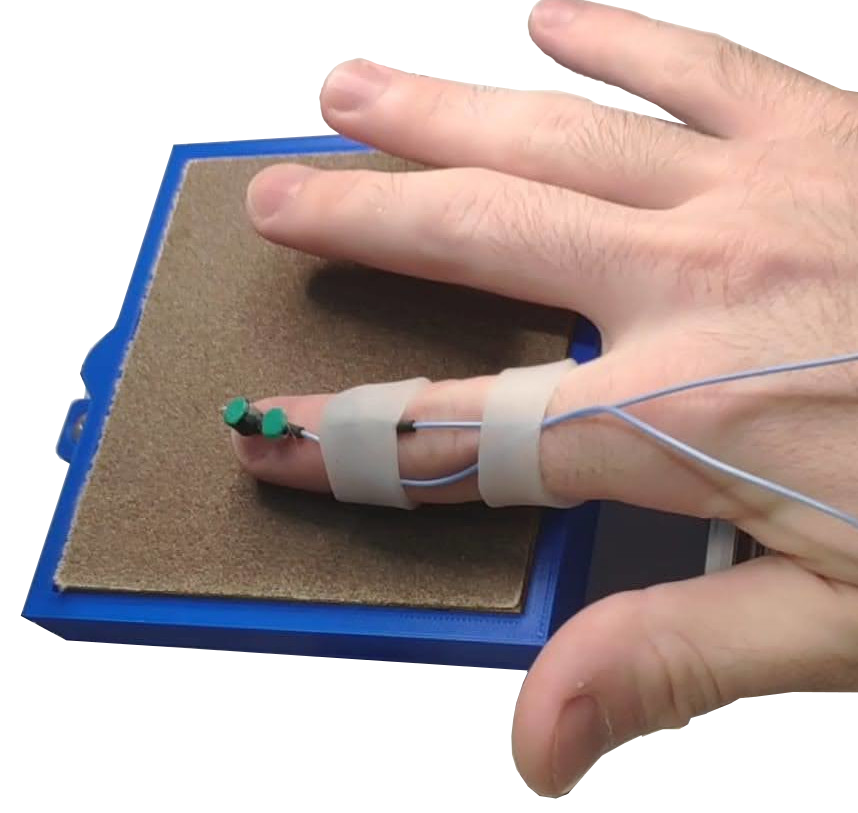
Friction-induced vibrations - sensed by accelerometers
-
Applied load - force/torque measurements
-
Fingertip position - precise tracking
-
Exploration speed - velocity data
Audio Signals
-
Directional microphones - capturing sound of finger-surface interaction
-
Synchronized recording - aligned with other modalities
Visual Signals
-
Stereoscopic images - high-resolution 4K cameras
-
Multiple angles - comprehensive visual coverage
Data Collection
Participants
-
10 participants providing diverse interaction styles
-
Controlled conditions for reproducibility
Surfaces
-
10 textured surfaces representing different materials
-
Varied roughness, patterns, and materials
Scenarios
-
Free exploration - natural, unconstrained interaction
-
Controlled exploration - systematic parameter variation
Research Applications
Human Perception Studies
Understanding how humans integrate multiple senses to perceive texture:
-
Which modalities are most important?
-
How do they combine?
-
What makes textures distinguishable?
Haptic Feedback Design
Informing the design of haptic systems:
-
What signals need to be reproduced?
-
Which are most salient?
-
How accurate must reproduction be?
AI-Driven Texture Recognition
Training machine learning models:
-
Our classifier achieved high accuracy across modality combinations
-
Demonstrates potential for robotic texture recognition
-
Enables human-machine interaction applications
The Bigger Picture
This dataset advances our understanding of tactile perception - knowledge essential for creating prosthetics and robotic systems that can truly feel.