From Intuition to Theory
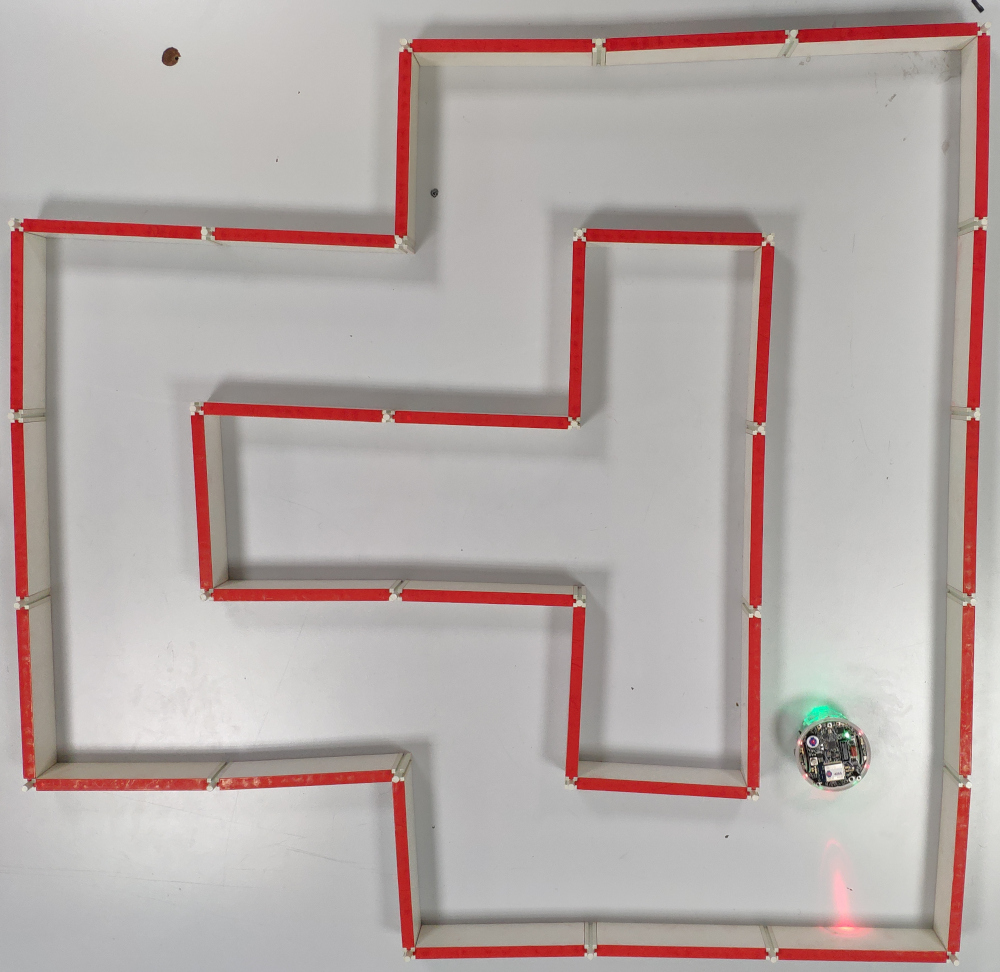
For my school project, I used an e-puck robot developed by EPFL to explore and implement various algorithms in robotics. This project marked a transition from intuitive building to formal algorithm implementation.
The Platform
The e-puck is a small mobile robot designed for education and research:
-
Multiple sensors (proximity, accelerometer, camera)
-
Onboard processing capability
-
Open-source software ecosystem
Algorithms Implemented
1. SLAM (Simultaneous Localization and Mapping)
The robot constructs a map of an unknown environment while estimating its position within that environment. This involves:
-
Navigating through the area
-
Gathering sensor data
-
Creating an accurate representation of surroundings
-
Continuously updating position estimates
2. RRT (Rapidly-exploring Random Tree)
An efficient path planning algorithm for finding the shortest path between two points:
-
Generates a random tree of potential paths
-
Enables navigation from start to destination
-
Avoids obstacles in the environment
3. Field Force Constraints
Integration of virtual force fields to ensure safe navigation:
-
Robot maintains safe distance from walls and obstacles
-
Prevents collisions during exploration
-
Smoother, more natural movement patterns
4. Mixture of Expert Neural Networks
Using the robot to study neural network specialization:
-
Different experts specialize in different motion patterns
-
Some experts excel at straight movement
-
Others specialize in turning motions
-
Insights into diverse specializations in neural networks
The Significance
This project bridged my self-taught skills with formal robotics education:
-
Mathematical foundations - understanding the theory behind the algorithms
-
Software architecture - implementing complex systems in code
-
Research methodology - systematic experimentation and analysis
These foundations would prove essential for my later research work.